COBB ANGELS · SCOLIORACLE
2D 超声影像合成 3D 体数据
使用 UltraBones100k 的一段公开 2D 超声扫查记录:左侧为 tracking 位姿融合出的骨表面点云,右侧可逐帧查看原始超声图像和 label overlay。
Cobb Angels 技术演示:从二维医学影像、空间位姿到三维可视化,用于脊柱/骨性结构 AI 工作流的交互说明。
Cobb Angels
28 帧
5045 点
CC BY 4.0
3D 重建视图
范围计算中
当前帧
单位:mm
单帧组织标注
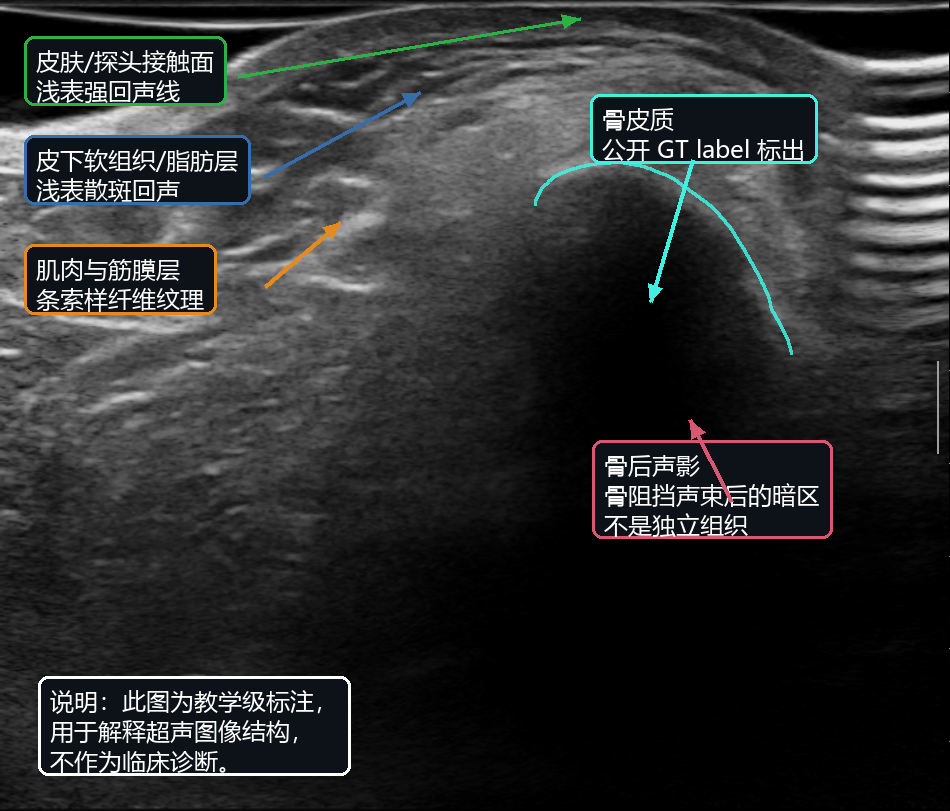
这张图截取当前扫查的第一帧,只做教学级解剖/声像图说明。
- 皮肤/探头接触面:近场顶部的浅表强回声线。
- 皮下软组织/脂肪层:浅层散斑样回声区域。
- 肌肉与筋膜层:可见条索样、层状纤维纹理。
- 骨皮质:白色曲线来自公开 GT label,表示骨表面。
- 骨后声影:骨阻挡声束后的深部暗区,不是独立组织。
重建体数据
横断面 XYZ
冠状面 XZY
矢状面 YZX
66 × 131 × 178 voxels
data/volume_compounded_0p4mm.mhd 反相体数据data/volume_bone_mask_0p4mm.mhd 白色骨质 maskdata/volume_compounded_0p4mm.npz合成原理
真正的自由手 3D 超声不是把相邻图片简单叠起来,而是给每张 2D 图像一个空间位姿,再把图像平面上的像素投影到统一的世界坐标系中。
p_world = T_tracking · T_calibration · T_scale · [u, v, 0, 1]^T
1
2D 影像采集
每张 PNG 是一次超声帧,像素坐标为
每张 PNG 是一次超声帧,像素坐标为
u, v,tracking.csv 提供像素间距和该帧探头位姿。
2
目标提取
这里用公开 GT label 找到骨表面,再做骨架化抽样;实际系统可换成阈值、分割网络或人工标注。
这里用公开 GT label 找到骨表面,再做骨架化抽样;实际系统可换成阈值、分割网络或人工标注。
3
标定与位姿融合
像素先乘
像素先乘
T_scale 变成毫米,再经过图像到探头的标定矩阵,最后乘每帧的 tracking 位姿。
4
3D 表达
label 表面点形成点云;原始灰度帧通过 voxel compounding 形成 0.4 mm 体数据,并在查看器中使用反相体数据 + 白色骨质 mask。
label 表面点形成点云;原始灰度帧通过 voxel compounding 形成 0.4 mm 体数据,并在查看器中使用反相体数据 + 白色骨质 mask。
本页是教育演示。它使用离体骨骼数据和公开标注,不应作为诊断、术前规划或临床测量依据;没有 tracking 的普通 2D 连续帧只能形成近似的 pseudo-3D。